Your argument is that one subtree might just miss the optimal trajectory, and hence the trajectory will have to double by adding a new subtree and then that expanded trajectory might miss again, inciting something of an infinite loop? I can see the first subtree just missing but I don’t see how the first expansion wouldn’t trigger the termination criterion – the trajectory end points should be contracting towards each other causing the termination condition to pass.

Let’s presume that there is an issue with the first expansion because the check against the ends of the doubled trajectory don’t trigger the termination criterion.
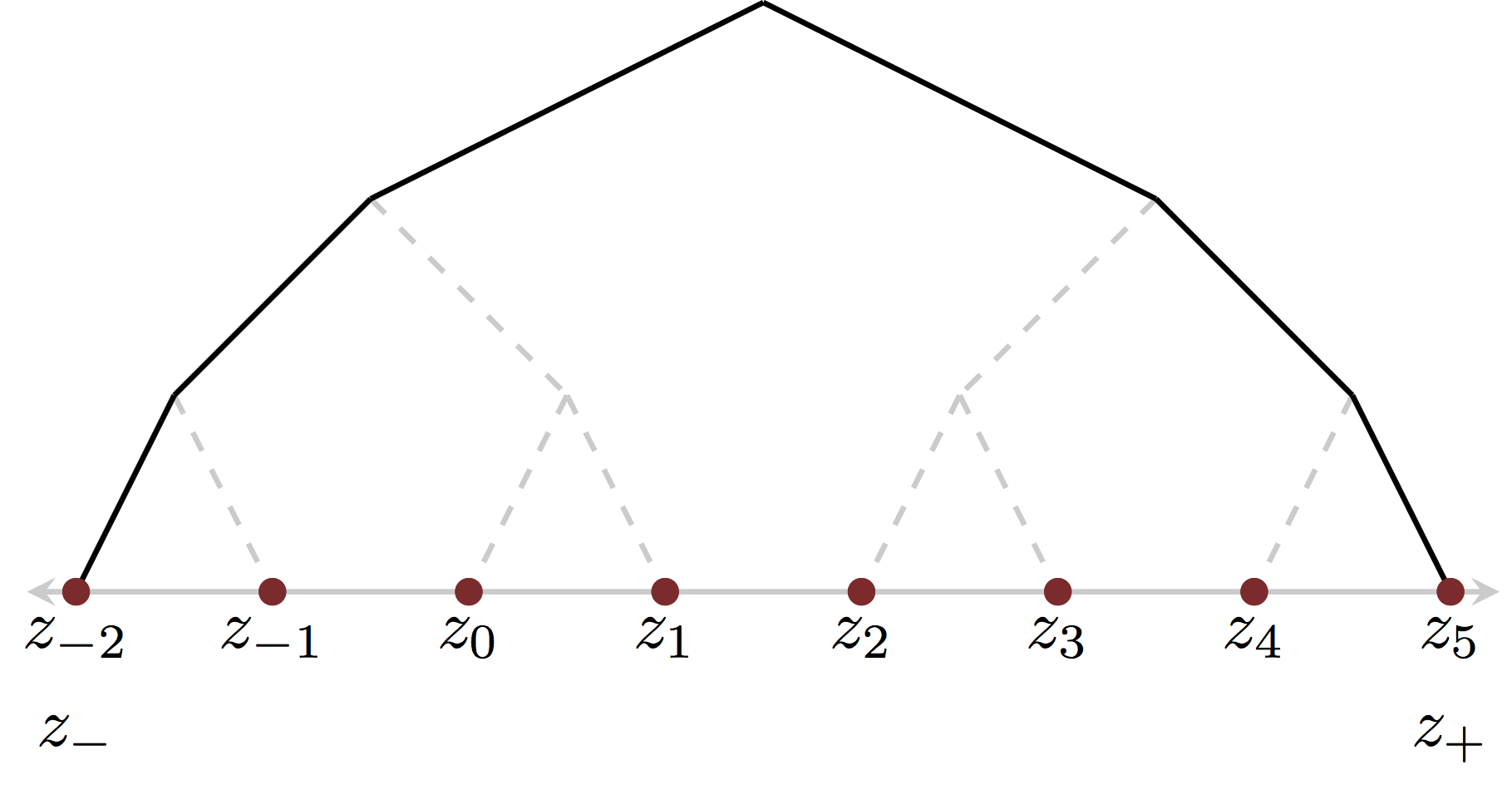
You’re then proposing additional checks beyond those at the boundaries of each subtree, right? For example if we wanted to push just a little bit further then we might check against the left-most state and right-most states in each subtree (left image) or the first state and the average momenta between the ends of two subtrees being merged (right image).

I can see how this would help avoid a doubling (at the cost of more checks and carrying around more than just the subtree end points, at least one more state at each level of the recursion) and is worth exploring.